产品:518
产品:518

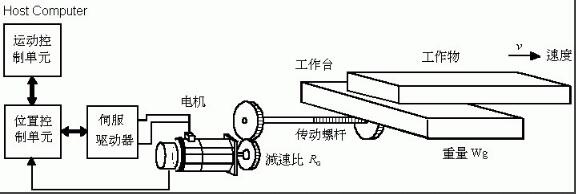
1、明确负载机构的运动条件要求,即加/减速的快慢、运动速度、机构的重量、机构的运动方式等。
2、依据运行条件要求选用合适的负载惯*计算公式,计算出机构的负载惯量。
3、依据负载惯量与电机惯量选出适当的假选定电机规格。
4、结合初选的电机惯量与负载惯量,计算出加速转矩及减速转矩。
5、依据负载重量、配置方式、摩擦系数、运行效率计算出负载转矩。
6、初选电机的*大输出转矩必须大于加速转矩加负载转矩;如果不符合条件,必须选用其他型号计算验证直至符合要求。
7、依据负载转矩、加速转矩、减速转矩及保持转矩,计算出连续瞬时转矩。
8、初选电机的额定转矩必须大于连续瞬时转矩,如果不符合条件,必须选用其他型号计算验证直至符合要求。
9、完成选定。

1、有些系统如传送装置,升降装置等要求伺服电机能尽快停车,而在故障、急停、电源断电时伺服器没有再生制动,无法对电机减速。同时系统的机械惯量又较大,这时对动态制动器的要依据负载的轻重、电机的工作速度等进行选择。
2、有些系统要维持机械装置的静止位置,需电机提供较大的输出转矩,且停止的时间较长。如果使用伺服的自锁功能,往往会造成电机过热或放大器过载,这种情况就要选择带电磁制动的电机。
3、有的伺服驱动器有内置的再生制动单元,但当再生制动较频繁时,可能引起直流母线电压过高,这时需另配再生制动电阻。再生制动电阻是否需要另配,配多大,可参照相应样本的使用说明来配。
4、如果选择了带电磁制动器的伺服电机,电机的转动惯量会增大,计算转矩时要进行考虑。